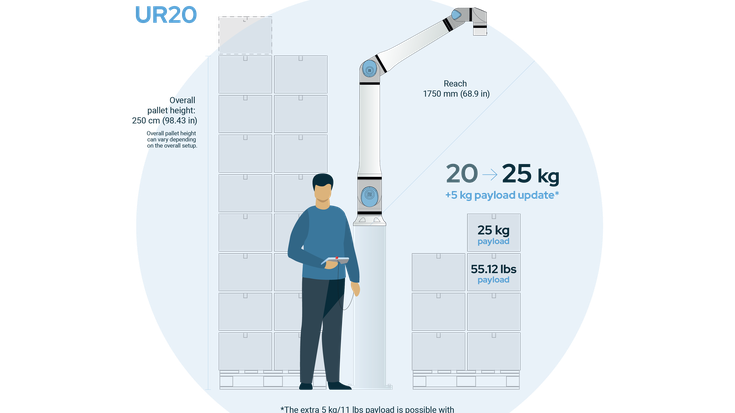
UR20は、当社の高可搬協働ロボットの中で最長のリーチを誇ります。非常にコンパクトな設置面積により、重量物を長距離で搬送するような用途にも柔軟に対応し、自動化の幅をさらに広げることができます。
UR20
スピードとパワーを兼ね備えた協働ロボット
リーチ 1750 mm / 68.9 in
可搬重量 25 kg / 55.12 lbs
設置スペース Ø 245 mm
重量 64 kg / 141.1 lbs
リーチ 1750 mm / 68.9 in
可搬重量 25 kg / 55.12 lbs
設置スペース Ø 245 mm
重量 64 kg / 141.1 lbs
ニーズに合わせてスケールアップ
可搬重量やリーチは協働ロボット選定の重要なポイントですが、現代の協働ロボットにはそれ以外にも「操作性」「設置スペース」「導入の柔軟性」「ソフトウェア機能」「環境配慮」など、多くの要素が求められます。UR20はこれらすべての条件を満たし、さらにURシリーズで最長のリーチと最大の可搬重量を誇ります。
UR20は、長いリーチで重いワークを持ち上げる作業を前提に設計されており、高速動作時でも優れたモーションコントロールにより、滑らかで精密な動きを両立します。
また、既存の生産現場にスムーズに自動化を導入できるよう、軽量かつコンパクトな設計を採用。設置場所を選ばず、多様な用途—マテリアルハンドリングから溶接まで—に対応可能な柔軟性を備えています。
可能性
リーチの延長により、より負荷の高い作業にも協働ロボットの自動化を拡大でき、生産効率の向上がさらに期待できます。
生産性
UR20は当社のラインナップの中で最高レベルの速度を誇る協働ロボットであり、生産性の向上とプロセスの高速化を実現します。
モーションコントロール
最大リーチで最大可搬重量を持ち上げながら、ロボットの全速度域と加速度をフルに活用できます。
UR20の主なアプリケーション
UR20はさまざまな用途で活用可能です。以下の代表的なアプリケーションをクリックして、詳細をご覧ください。

可搬重量の性能
URロボットの最大可搬重量*のスペックは動作領域内全域において有効です。さらに、荷重の重心がツールフランジから離れる場合でも、業界最高レベルの可搬重量性能を維持します。そのため、将来的に異なる用途で使用することになっても、高い汎用性をもって対応できる可能性があります。
* 25kgの可搬重量はツールフランジが下向きの状態で適用されます。それ以外の姿勢における可搬重量は20kgです。

安全性
可搬重量の向上、スピードとリーチ性能の強化を図りながらも、常に最優先としているのは作業者の安全です。真の協働ロボットを実現するために、当社のエンジニアたちは安全機能の開発に多くの時間を費やしました。その成果として、現在の協働型産業用ロボットにおける安全基準の指標となる設計を実現しています。

協働ロボットの導入効果を最大限に引き出しましょう
協働ロボットを当社のコネクティビティ・プラットフォームと連携させることで、生産性の向上、ダウンタイムの最小化、そして効率的なフリート管理を実現できます。オフィスがどこにあっても、すべてを一元的に管理可能です。
作業効率を高めるための設計
私たちは、「自動化をあらゆる人に、あらゆる場所で」というミッションを実現できることを目指しています。安全で協調的な人とロボットの共存を可能にすることで、お客様のビジネス革新の道のりを力強くサポートします。

迅速な立ち上げ
ロボット未経験の方でも、協働ロボットの箱が届いてから、開封して設置し、最初の簡単な作業プログラムの作成まで、通常1時間以内で完了できます。

省スペース
当社の協働ロボットはコンパクトな設計のため、既存の製造現場の限られたスペースでも導入しやすく、自動化の可能性を広げます。

消費電力
URの協働ロボットは従来の産業用ロボットよりも電力消費が少ないため、省エネにも貢献します。

協調性と安全性
すべてのURロボットには、外力を検知し安全にアームを停止させる機能などの安全機能が多数標準搭載されています。この安全機能はURロボットの場合は常時有効なままです。これにより、安全柵が不要で人と一緒に作業ができ、生産性の向上と安全な作業環境の実現が可能です。(リスクアセスメントが必要です)
モーションコントロール
塗布、溶接、機械へのワーク投入などのプロセス用途では、スムーズな動きが重要です。 当社のモーションコントロールアルゴリズムは、可動部の摩耗を抑え、稼働時間の延長とメンテナンス頻度の低減を実現します。これにより、協働ロボットは高速での動作を維持しながらも、長寿命かつ高品質な運用が可能になります。
協働ロボットを活用する
URアカデミーでは、プログラミングのわかりやすい手順や、トラブル対応や修理に役立つチュートリアルを揃えています。
ツール設定
ツールセンターポイント(TCP)や、荷重と重心の正しい設定方法を学びましょう。

安全平面
安全平面の作成と設定方法を学びましょう。安全平面は、通常モードや減少モード、あるいは両方でロボットがその範囲を超えて動くのを防止したり、減少モードを自動で起動させたりすることができます。

詳しく見る
URアカデミーにアクセスして、UR協働ロボットのプログラミングに必要な基本を学べる人気のトピックや教材をぜひご覧ください。

稼働時間を最大化
UR Care 保守契約では、お客様の稼働率を第一に考えています。24時間365日のサポートやリモート接続、現地での迅速な修理対応を通じて、安定した稼働をしっかりサポートします。
ご質問はこちら
よくある質問をまとめたリストを、FAQページでご覧いただけます。

UR Developer Suite
ロボットシステムを作りたい方のために、充実したコンテンツをまとめた「UR Developer Suite」をご用意しました。成功に役立つツールやチュートリアル、各種リソースが揃っていますので、ぜひこちらからご覧ください。

myURカスタマーポータル
今すぐ協働ロボットを登録して、カスタマーポータル「myUR」にアクセスしましょう。最新ソフトのダウンロードや、オンライン・現地サポートの問い合わせ、ロボットデータの確認を一か所で行えます。

UR+エコシステム
接着剤ディスペンサーから検査用カメラまで、300種類以上の適合確認済み周辺機器を取り揃えています。
見積もり依頼
右側のフォームに必要事項をご入力ください。担当から追ってご連絡いたします。
【お問い合わせステップ】
- フォームを送信
- お住まいの地域のUR担当者が詳細をお伺いし、ご連絡します。ご希望に応じて、無料の対面デモも手配可能です。
- お客様のビジネスに最適なソリューションとお見積もりをご提案いたします。
現地オフィス
- ユニバーサルロボット
- 芝二丁目28-8 芝二丁目ビル14階
- 105-0014 東京都港区
お問い合わせ: 03-3452-1202
お問い合わせ: 0120-163510